Walking in Narrow Spaces: Safety-critical Locomotion Control for Quadrupedal Robots with Duality-based Optimization
Under Review
Abstract
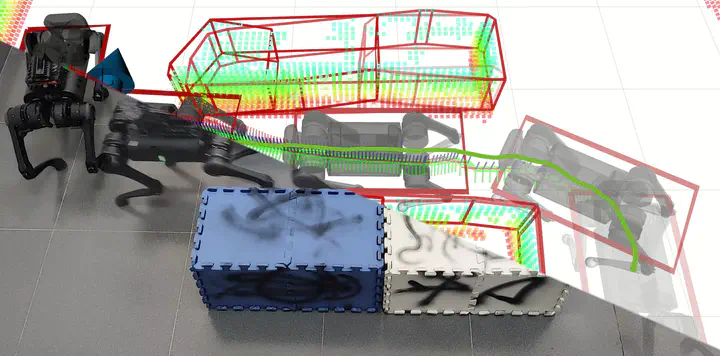
This paper presents a safety-critical locomotion control framework for quadrupedal robots. Our goal is to enable quadrupedal robots to safely navigate in cluttered environments.To tackle this, we introduce exponential Discrete Control Barrier Functions~(exponential DCBFs) with duality-based obstacle avoidance constraints into a Nonlinear Model Predictive Control~(NMPC) with Whole-Body Control~(WBC) framework for quadrupedal locomotion control.This enables us to use polytopes to describe the shapes of the robot and obstacles for collision avoidance while doing locomotion control of quadrupedal robots. Compared to most prior work, especially using CBFs, that utilize spherical and conservative approximation for obstacle avoidance, this work demonstrates a quadrupedal robot autonomously and safely navigating through very tight spaces in the real world. (Our open-source code is available at https://github.com/HybridRobotics/quadruped_nmpc_dcbf_duality, and the video is available at https://youtu.be/p1gSQjwXm1Q.